



LGL-IR03型 工业机器人综合实训平台
工业机器人不同于其他机电设备,是一种实现某种工艺过程的柔性平台,工艺种类完全由其所安装的末端执行器和配套的周边设备决定。对于基础教学,不能仅针对工业机器人本身的功能和操作进行教学,而是要着眼于工业机器人工作站系统,以实现工业机器人基本结构和基础操作、工作站系统调试和搭建、工业机器人及周边设备编程和通讯等内容的实训。 LGL-IR03型 工业机器人综合实训平台桌面型由工业机器人、实训模块、气动工具、基础台架和附属设备组成,针对职业院校的教学特点,综合理、虚、实一体化教学特征,选用性能优良的设备,采用*新自动化技术,融合“智能制造、智慧工厂”理念,采用“模块化、简易化”设计方法,可充分学习工业机器人及其周边应用技术,确实掌握相关实操技能,在不减少实训项目和真实工厂应用特点的前提下尽可能确保教学过程的方便、安全。 LGL-IR03型 工业机器人综合实训平台工作站桌面型主要应用在工业机器人基础操作教学阶段,可以实现工业机器人基本结构、基础操作、参数配置、在线示教编程、简单语言编...
分类:


描述
工业机器人不同于其他机电设备,是一种实现某种工艺过程的柔性平台,工艺种类完全由其所安装的末端执行器和配套的周边设备决定。对于基础教学,不能仅针对工业机器人本身的功能和操作进行教学,而是要着眼于工业机器人工作站系统,以实现工业机器人基本结构和基础操作、工作站系统调试和搭建、工业机器人及周边设备编程和通讯等内容的实训。
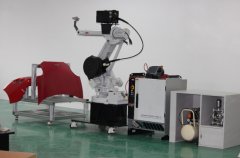
LGL-IR03型 工业机器人综合实训平台桌面型由工业机器人、实训模块、气动工具、基础台架和附属设备组成,针对职业院校的教学特点,综合理、虚、实一体化教学特征,选用性能优良的设备,采用*新自动化技术,融合“智能制造、智慧工厂”理念,采用“模块化、简易化”设计方法,可充分学习工业机器人及其周边应用技术,确实掌握相关实操技能,在不减少实训项目和真实工厂应用特点的前提下尽可能确保教学过程的方便、安全。
 LGL-IR03型 工业机器人综合实训平台工作站桌面型主要应用在工业机器人基础操作教学阶段,可以实现工业机器人基本结构、基础操作、参数配置、在线示教编程、简单语言编程、工具更换、复杂轨迹规划及编程、模拟上下料和码垛工艺应用、IO通讯、离线编程应用等教学内容,实训台式设计特别适合于标准教室型实训场地,为学生掌握基础编程能力和调试技能提供硬件支撑,满足教学需求。
LGL-IR03型 工业机器人综合实训平台工作站桌面型主要应用在工业机器人基础操作教学阶段,可以实现工业机器人基本结构、基础操作、参数配置、在线示教编程、简单语言编程、工具更换、复杂轨迹规划及编程、模拟上下料和码垛工艺应用、IO通讯、离线编程应用等教学内容,实训台式设计特别适合于标准教室型实训场地,为学生掌握基础编程能力和调试技能提供硬件支撑,满足教学需求。
一、产品特点:
1、突出高(高端职业技能)、新(新兴职业技能)、长(长期技能开发)、前(前瞻性技能开发);
2、工业机器人综合实训平台采用模块化设计,实训功能可由学员自主搭配,能完成工业机器人多个应用;3)周边设备与机器人系统互相通讯、协调作业,实现生产过程的自动化、智能化;
3、工业机器人综合实训平台能完成工业机器人运行轨迹操纵,程序数据及其设定等示教编程;
4、能完成机器人I/O的控制与通讯、应用工作站的系统集成等技能操作。
二、设备运行环境参数:
1、交流电源:单相 AC 220V±10% 50 Hz;
2、工作环境:-10~40 ℃;环境湿度:≤90%(25℃);
3、整机功耗:≤1.5 kW;
4、安全保护措施:安全保护措施:具有接地、漏电压、漏电流保护,安全指标符合国家标准
5、外形尺寸(长宽高):1800×1200×1500mm。
三、工业机器人技术参数:
1、轴数:6轴
2、负载:3~6kg
3、工作范围:半径540~1400mm
4、重复定位精度:±0.1mm
5、防护等级:IP54
6、控制方式:AC伺服控制
7、输入电源:交流单相220V,频率50Hz
8、额定功率:3kW
9、 安全保护:急停开关、漏电保护、短路保护、过载保护
四、实训项目:
1、工作站结构认知
2、关键设备的特性和参数设置
3、工业机器及周边设备的维护及典型错误排查
4、工业机器人手动控制及基本参数设置
5、工业机器人I0通信及PLC信息交互
6、工业机器人单轴运动与线性运动控制
7、工业机器人工具TCP参数标定
8、工业机器人工件坐标系参数标定及多坐标系切换
9、基干关键点的轨迹编程(精确定位惯弧逼近)
10、基于样条曲线的轨迹编程
11、条件判断语句的用法及编程
12、循环语句的用法及编程
13、子程序的编程及调用
14、模拟码垛工艺应用编程
15、模拟上下料工艺应用编程
16、工业机器人与PLC的通讯与联调
17、基于RobotArt的工作站模型环境搭建与配置
18、基于RobotArt的简单平面轨迹离线编程应用
19、基于RobotArt的模拟搬运码垛离线编程应用
20、基于RobotArt的模拟上下料离线编程应用
21、基于RobotArt的写字绘图离线编程应用
LGL-IR03型 工业机器人综合实训平台桌面型由工业机器人、实训模块、气动工具、基础台架和附属设备组成,针对职业院校的教学特点,综合理、虚、实一体化教学特征,选用性能优良的设备,采用*新自动化技术,融合“智能制造、智慧工厂”理念,采用“模块化、简易化”设计方法,可充分学习工业机器人及其周边应用技术,确实掌握相关实操技能,在不减少实训项目和真实工厂应用特点的前提下尽可能确保教学过程的方便、安全。
一、产品特点:
1、突出高(高端职业技能)、新(新兴职业技能)、长(长期技能开发)、前(前瞻性技能开发);
2、工业机器人综合实训平台采用模块化设计,实训功能可由学员自主搭配,能完成工业机器人多个应用;3)周边设备与机器人系统互相通讯、协调作业,实现生产过程的自动化、智能化;
3、工业机器人综合实训平台能完成工业机器人运行轨迹操纵,程序数据及其设定等示教编程;
4、能完成机器人I/O的控制与通讯、应用工作站的系统集成等技能操作。
二、设备运行环境参数:
1、交流电源:单相 AC 220V±10% 50 Hz;
2、工作环境:-10~40 ℃;环境湿度:≤90%(25℃);
3、整机功耗:≤1.5 kW;
4、安全保护措施:安全保护措施:具有接地、漏电压、漏电流保护,安全指标符合国家标准
5、外形尺寸(长宽高):1800×1200×1500mm。
三、工业机器人技术参数:
1、轴数:6轴
2、负载:3~6kg
3、工作范围:半径540~1400mm
4、重复定位精度:±0.1mm
5、防护等级:IP54
6、控制方式:AC伺服控制
7、输入电源:交流单相220V,频率50Hz
8、额定功率:3kW
9、 安全保护:急停开关、漏电保护、短路保护、过载保护
四、实训项目:
1、工作站结构认知
2、关键设备的特性和参数设置
3、工业机器及周边设备的维护及典型错误排查
4、工业机器人手动控制及基本参数设置
5、工业机器人I0通信及PLC信息交互
6、工业机器人单轴运动与线性运动控制
7、工业机器人工具TCP参数标定
8、工业机器人工件坐标系参数标定及多坐标系切换
9、基干关键点的轨迹编程(精确定位惯弧逼近)
10、基于样条曲线的轨迹编程
11、条件判断语句的用法及编程
12、循环语句的用法及编程
13、子程序的编程及调用
14、模拟码垛工艺应用编程
15、模拟上下料工艺应用编程
16、工业机器人与PLC的通讯与联调
17、基于RobotArt的工作站模型环境搭建与配置
18、基于RobotArt的简单平面轨迹离线编程应用
19、基于RobotArt的模拟搬运码垛离线编程应用
20、基于RobotArt的模拟上下料离线编程应用
21、基于RobotArt的写字绘图离线编程应用




