



LG-SX604型 工业机器人(6轴)
LG-SX系列工业机器人打破传统运动方式,进行创新设计,在通用六轴工业机器人的基础上, SX系列工业机器人新增内旋转功能,轻松实现如钻工中心等间距很小,但又要求机器人臂长大的机器人完成狭小空间工位间连线或搬运。占地面积非常小,运动运动非常灵活并且不占用外部空间,为CNC高速钻工中心特殊设计。内外双旋转结构,可轻松实现钻工中心间距600以内狭小空间工位间连线或搬运,轻松避让且速度快。 工业机器人本体 双旋工业机器人概念 一、产品特点 1、360°空间全覆盖,无死角 2、高防护版本56轴可任意方向喷水 3、人机共融(人机协作版本) 4、安装占地面积小 5、高精度,高灵活性 6、高速,惯量小 7、重量轻,任意方向安装 8、模块化、系列化、定制 9、高性价比 二、技术参数 工业机器人 LG-SX604 自由度 6 额定负载 4KG *大工作半径 1402mm 重复定位精度 ±0.06mm 运动范围 J1 ±155° J2 -178°/-2° J3 +141.5°/+398.5° J4 ±90° J5 ±96.5° J6 ±360° 额定速度 J1 180°/s,3.14 rad/s J2 150°/s,2.62 r...
分类:


描述
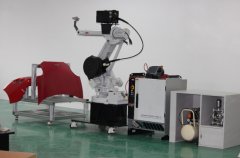
LG-SX系列工业机器人打破传统运动方式,进行创新设计,在通用六轴工业机器人的基础上, SX系列工业机器人新增内旋转功能,轻松实现如钻工中心等间距很小,但又要求机器人臂长大的机器人完成狭小空间工位间连线或搬运。占地面积非常小,运动运动非常灵活并且不占用外部空间,为CNC高速钻工中心特殊设计。内外双旋转结构,可轻松实现钻工中心间距600以内狭小空间工位间连线或搬运,轻松避让且速度快。

工业机器人本体

双旋工业机器人概念
一、产品特点
1、360°空间全覆盖,无死角
2、高防护版本56轴可任意方向喷水
3、人机共融(人机协作版本)
4、安装占地面积小
5、高精度,高灵活性
6、高速,惯量小
7、重量轻,任意方向安装
8、模块化、系列化、定制
9、高性价比
二、技术参数
三、工业机器人运动范围参数图
 四、应用领域
四、应用领域

工业机器人本体
双旋工业机器人概念
1、360°空间全覆盖,无死角
2、高防护版本56轴可任意方向喷水
3、人机共融(人机协作版本)
4、安装占地面积小
5、高精度,高灵活性
6、高速,惯量小
7、重量轻,任意方向安装
8、模块化、系列化、定制
9、高性价比
二、技术参数
| 工业机器人 | LG-SX604 | |
| 自由度 | 6 | |
| 额定负载 | 4KG | |
| *大工作半径 | 1402mm | |
| 重复定位精度 | ±0.06mm | |
| 运动范围 | J1 | ±155° |
| J2 | -178°/-2° | |
| J3 | +141.5°/+398.5° | |
| J4 | ±90° | |
| J5 | ±96.5° | |
| J6 | ±360° | |
| 额定速度 | J1 | 180°/s,3.14 rad/s |
| J2 | 150°/s,2.62 rad/s | |
| J3 | 180°/s,3.14 rad/s | |
| J4 | 225°/s,3.93 rad/s | |
| J5 | 225°/s,3.93 rad/s | |
| J6 | 360°/s,6.28 rad/s | |
| *高速度 | J1 | 300°/s,5.23rad/s |
| J2 | 250°/s,4.36rad/s | |
| J3 | 300°/s,5.23 rad/s | |
| J4 | 375°/s,6.54 rad/s | |
| J5 | 375°/s,6.54rad/s | |
| J6 | 600°/s,10.47 rad/s | |
| 容许惯性矩 | J6 | 0.15㎏㎡ |
| J5 | 0.23㎏㎡ | |
| J4 | 0.42㎏㎡ | |
| 容许扭矩 | J6 | 12.7NM |
| J5 | 16.5NM | |
| J4 | 20.4NM | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 数字量:32输入,31输出(控制柜故障指示灯输出占用1) | |
| 电源容量 | 2.6kVA | |
| 额定功率 | 2.1kW | |
| 额定电压 | 单相AC220V | |
| 额定电流 | 11.3A | |
| 本体防护等级 | IP54 | |
| 安装方式 | 地面安装 | |
| 本体重量 | 52kg | |
| 控制柜防护等级 | IP53 | |
| 控制柜尺寸 | 500(宽)×270(厚)×530(高)-可立可卧 | |
| 控制柜重量 | 38KG | |
数控机床上下料

冲压生产线

工控盒铆钉自动送料—压铆—镭雕—组装自动化
工控盒铆钉自动送料—压铆—镭雕—组装自动化




