



LG-RMD05型 工业机器人码垛实操工作站


一、概述
LG-RMD05型 工业机器人码垛工作站适用于本科、高职院校机器人相关专业开设的《机器人机械系统》、《机器人控制技术》、《机器人视觉与传感技术》、《工业机器人应用与编程》、《现场总线技术及其应用》《可编程控制技术》、《电气及PLC控制技术》等课程。

二、技术性能
1、输入电源:3/N/PE AC 380V±10% 50Hz;
2、工作环境:温度–10℃~+40℃,相对湿度<85%(25℃),海拔<4000m;
3、装置容量:<3KVA;
4、供气气源:配备空压机一台,三联件一套。
5、外形尺寸:2400mm×4000mm×1680mm;
6、安全保护:具有漏电压、漏电流、过载保护装置,安全符合国家标准。
三、配置及参数
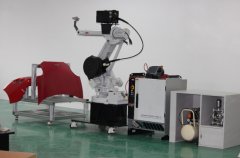
系统主要由 1 台六轴工业机器人、1 个机器人吸盘夹具、1台PLC S7-1200 CPU1214、1 个机器人工作台、1条滚筒输送线、1个电控装置等组成,此工位实现搬运,码垛。工业机器人含国产六轴工业机器人本体;控制柜:独立控制柜、配套控制器;示教器;实训模块:机器人吸盘夹具模块、滚筒输送机模块、栈板码垛模块,纸箱搬运放置模块组成。电气控制电路板模块:包含漏电保护器、熔断器、按钮、中间继电器等电气控制元件。
1、工业机器人参数
|
安装方式 |
地面垂直、侧装 |
额定电源电压 |
单相200-230V |
|||||||
|
整机重量 |
130KG |
电源电压容许范围 |
‘-15%~ +10% |
|||||||
|
防护等级 |
Ip65 |
电源频率变动范围 |
50HZ/60HZ |
|||||||
|
重复定位精度 |
±0.05MM |
机器人至控制柜的重载线 |
6M |
|||||||
|
最大臂展 |
最大负载 |
|
JI |
J2 |
J3 |
J4 |
J5 |
J6 |
||
|
1500 |
10kg |
臂展Arm Length ( mm ) |
128 |
450 |
570 |
131 |
640 |
121.5 |
||
|
动作范围 Montion Range(° ) |
±170 |
±170 |
70/-85 |
±180 |
-4.75 |
360 |
||||
|
最大速度Max Spen(° /S) |
120 |
120 |
240 |
300 |
280 |
350 |
||||
|
功率 Motor Power ( W ) |
1500 |
1500 |
1000 |
400 |
200 |
100 |
||||
2、滚筒输送线:
滚筒输送机之间易于衔接过渡组成的物流输送系统。滚筒输送机适用于底部是平面的物品输送,主要由传动滚筒、机架、支架、驱动装置等部分组成。具有输送量大,速度快,运转轻快,能够实现多品种共线分流输送的特点。
结构形式:有动力输送,水平输送。
尺寸规格:滚筒内宽400mm,长度≥2000mm
机架材质: 铝型材。
动力方式: 电动滚筒驱动。
传动方式:双链轮。
调速方式:变频调速。
传动速度:最大60m/min。
最大负载:单元最大50KG
栈板规格:长宽高约1200mm*1000mm*1000mm,木质材质。
3、电气控制系统:
配备西门子S7-1200 CPU1214可编程控制器,自带以太网通讯模块、数字量扩展模块控制机器人、电机、气缸等执行机构动作,处理各单元检测信号,管理工作流程、数据传输等任务。
4、云智能实验室安全管理系统
本平台将无线传输、信息处理等物联网技术应用用于自动化远程控制。设备端运行状态、数据参数等上传至云平台。物联网系统的传感层、传输层和应用层关联掌握数据与分析数据。
(1)电压、电流等模拟量数据显示
(2)输入开关监控,输出开关等数字量控制。
(3)远程控制启停状态,给定输出电压值的。
(4)显示输入输出电压值的历史数据
(5)可按照日期、日间进行查询历史数进行查询。
(6)报警信号为PLC主机模拟量采集数值或者开关量可以自由设定,如当模拟量输入超过设定电压时产生报警,通过物联网自动化应用软件将报警信号上传到云平台,通过云平台向设置的终端推送报警信号,每台设备可对应多个终端设备。
(7)通过手机端可以实现远程控制PLC的输出及监视PLC的输入状态变化。
(8)数据显示画面:画面显示输入电压数值,输出电压监控,开关状态输入,开关控制输出,以及云端连接二维码。
(9)联网设置界面:设置现场数据连接云平台后台数据库管理。
★为保证软件正版,投标时提供云智能实验室安全管理系统软件著作权证书原件备,提供第含以上功能内容的第三方检测报告。
5、智能制造生产线虚拟仿真系统
通过本系统软件了解组成智能制造生产线的电气、气动、PLC等元件的工作原理并对机电系统的设计、分析进行虚拟仿真。通过选择元件利用符合绘制二维回路图或利用三维模型在系统内实现智能制造的动作而进行虚拟仿真。本系统不仅实现工厂的三维仿真使虚拟现实仿真更加逼真,而且把通过仿真验证的控制逻辑单元可用作监视及控制模块,使能够实现并行工程及软件、硬件的并行设计。
仿真基本模块包括:
(1)反馈控制和顺序控制系统
(2)指示灯的与门(AND)控制
(3)物品传送装置
(4)单向气缸控制
(5)双缸联动控制
(6)带式输送装置系统
(7)滚筒式输送装置系统
(8)指示灯顺序闪烁回路
(9)自动控制标记打印操作控制
(10)电梯控制
(11)气压控制移动装置
(12)工业机器人控制
(13)带式传送带实习装置
(14)气压传动流水线实验装置
★投标时提供智能制造生产线虚拟仿真系统软件著作权证书原件备查。
6、实验室智能电源安全管理系统
实训室总体智能电源管理系统由主电路、控制电路、检测保护电路、显示电路、语音报警电路等组成,整个实验室配置一套管理系统。
主要功能:
(1)上电系统自测
1)主电路及控制电路上电后对线路系统进行输入电压的过压、欠压;线路对地漏电;输出负载过流的检测,任一故障存在电源输出断开。
2)故障内容有相应文字显示。
3)对故障进行语音报警。
(2)运行检测保护
1)输入过压、欠压、输出过流、漏电,任一故障出现将自动跳闸,实施保护。
2)对故障进行语音报警。
3)保护阀值可进行现场设置。
(3)漏电功能测试
1)按下漏电测试按钮,装置会自动提供一个漏电测试信号,使保护器跳闸。
2)重新进行上电进入自己检测状态,文字显示“开机检测中....”,无故障情况下,实训室智能电源管理系统恢复供电。
(4)过压保护
1)运行中,出现输入过压,实训室智能电源管理系统将跳闸。
2)对应的“过压相”进行文字显示。
3)语音播报“线路过压,请注意”。
(5)过流保护
1)运行中,三相电源中任一相出现过流,实训室智能电源管理系统将跳闸。
2)对应的“过流相”进行文字提示。
3)语音播报“线路过流,请注意”
(6)漏电保护
1)运行中,三相中任一相出现漏电,实训室智能电源管理系统将跳闸。
2)对“漏电”进行文字显示。
3)语音播报“线路漏电,请注意”。
(7)电源监控
1)可对各相电压进行数值显示及曲线显示,显示精度±5V
2)可对各相电流进行数值显示及曲线显示,显示精度±
3)高压保护电压设置:设置范围<300V,输入1A;动作时间:2-5S,输入单位0.1S
4)欠压保护电压设置:设置范围:>154V,输入单位1V;动作时间:2-5S,输入单位0.1S
5)过流保护电流设置:设置范围:<20A,输入单位0.01A;动作时间:0.5-2S,输入单位0.1S
★投标时现场演示功能并提供带以上功能内容的检测报告。
四、实训项目
1、工业机器人实训
(1) 工业机器人的分类及应用;
(2) 工业机器人的组成;
(3) 工业机器人的坐标系;
(4) 工业机器人的基本规格;
(5) 工业机器人工作空间;
(6) 工业机器人电气控制柜;
(7) 示教器基本功能与操作;
(8) 工业机器人操作安全注意事项;
(9) 手动操作工业机器人;
(10) 工业机器人的手动运行界面;
(11) 工业机器人的基本操作;
(12) 码垛机器人的编程与操作;
(13) 码垛机器人工作流程;
(14) 码垛机器人搬运工艺分析;
(15) 码垛运动规划和示教前的准备;
(16) 码垛示教编程;
(17) 工业机器人操作能力、保养能力;
(18) 工业机器人初、中级编程。
2、工业控制实训
(1) 工装夹具设计能力、虚拟仿真等实战能力;
(2) 气动手爪的控制;
(3) 气动、电气(包含传感器)、机电综合运用能力;
(4) 机器人高级编程(变位机通信)、码垛工艺、整体工作站集成等能力;
(5) 码垛搬运的机械传动与调试。
3、码垛实训
(1) 工业控制PLC编程;
(2) 码垛搬运的自动化控制;
(3) 码垛工业机器人的控制。




