



TYK-TSV03型 智能网联微缩车


一、智能网联微缩教具车介绍
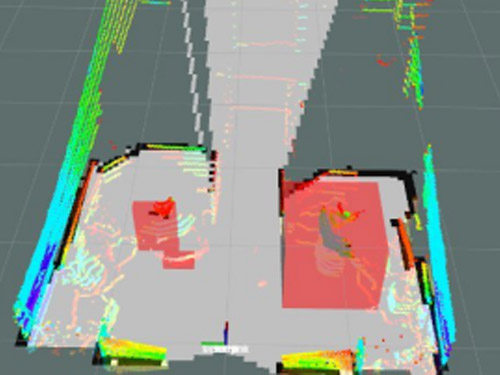
智能网联微缩教具车实训设备采用四轮独立驱动、差速转向的线控底盘,搭载 360 度扫描式激光雷达、惯性陀螺仪、视觉摄像头、超声波雷达,实现室内场景导航、 循迹、避障、绕障、遵守交通标识等自动驾驶功能。采用先进的 AI 人工智能计算平台,可进行图像识别、SLAM定位、环境感知、障碍物探测、交通标识识别、多传感器融合、自动驾驶决策与控制等教学和研究,并支持二次开发。

二、主要配件
1、四轮驱动线控底盘套件
2、线激光雷达
3、9轴IMU
4、摄像头
5、英伟达工控机
6、stm32控制版
7、显示屏
三、主要规格
1、小车底盘基本参数
尺寸:长*宽*高450*350*450mm
供电接口:5V和12V供电接口。
四个电机驱动,滑移转向系统。
带电池,控制板,和遥控器,可实现遥控驾驶。
2. 环境感知部件
(1)激光雷达
测量距离:0.15-12m
扫描角度:0-360度
测距分辨率:<0.5
角度分辨率:<=1度
测量频率:2000-8000Hz
扫描频率:1—10HZ
(2)IMU
类型:九轴传感器,加速度计,陀螺仪和磁强计
板载能力:板载ATmega328处理并通过串行流发送的所有传感器的输出
数据输出:支持FTDI、蓝牙、Xbee
输入电压:3.5-16DC
(3)摄像头
最大分辨率: 1920*1080
(4)工控机
英伟达nano工控机
Ubuntu18.04系统
ROS Melodic桌面板
(5)显示屏
10英寸高清显示屏, HDMI接口,12V供电
四、功能与实训学习
1、ROS安装与基本配置
2、激光雷达数据调用与可视化
3、IMU数据调用及可视化
4、IMU标定
5、摄像头标定
6、激光雷达参数配置与slam建图
7、里程计融合与标定
8、自动驾驶定位技术
9、自动驾驶导航技术
10、红绿灯识别参数标定与识别




