



TYK-IH03型智能网联汽车激光雷达便携式实验箱



一、产品概述
实验箱套件参照智能网联汽车实现原理,提取激光雷达传感器模块形成功能板块。试验箱包含整套实验设备,可单独直接进行毫米波雷达的实验实训教学。
二、设备参数
1、激光雷达
1)水平视角:360度;
2)垂直视角不低于30°
3)测距:≥50m
4)测距精度:±10cm
5)测距通道不低于16线
6)提供百兆以太网数据输出,包含距离、旋转角度、反射率等信息
7)工作温度至少满足:-20℃-85℃
8)工作电压:9-32V
9)防护等级:不低于IP67
2、显示器
1)尺寸:15.6寸
2)分辨率:1920*1080
3)接口:mini HDMI,3.5耳机插孔,内置双喇叭,内置HDR功能
4)电源:DC12V
3、主机
1)CPU:ARM Cortex-A78AEV8.2 64bit@1.5GHz(六核)
2)GPU:搭载16个TensorCore的512核NVIDAAAmpere架构GPU@625Mhz
3)算力:20TOPS
4)内存:4GB 64-bit LPDDR5、34 GB/S
5)USB接口:3×USB3.0+1 USB2.0+1 Type-C
6)视频编码:1080p30由1-2个CPU核心提供支持
7)视频解码:H.265(4K60,2×4K30,5×1080p60,11×1080p30)
8)GPIO引脚数:40
三、设备功能
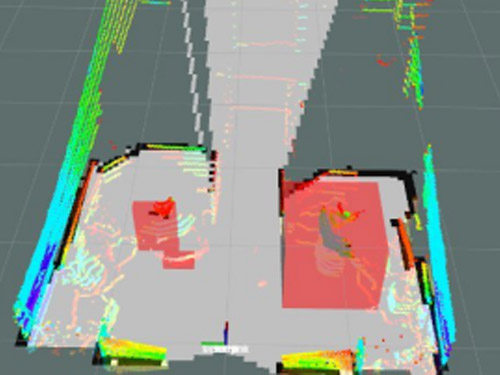
1、通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云。
2、可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定;
3、通过激光雷达感知算法控件,通过调节探测范围、滤波阀值、分割参数等参数,改变点云识别状态并对障碍物进行标识,实现对激光雷达识别算法的理解;可以测出障碍物与试验台自身的真实距离。
4、设置安全区域,安全区域内障碍物将被标志识别。
5、多种数据源输入,可调用激光雷达实时数据,录制的数据包、仿真实训台输出点云。
四、主要课程任务
1.激光雷达基本认知与原理
2.激光雷达的选型
3.激光雷达的安装与电气接口
4.激光雷达的配置
5.激光雷达多种数据源实验
6.障碍物识别实验
7.激光雷达的外参标定




